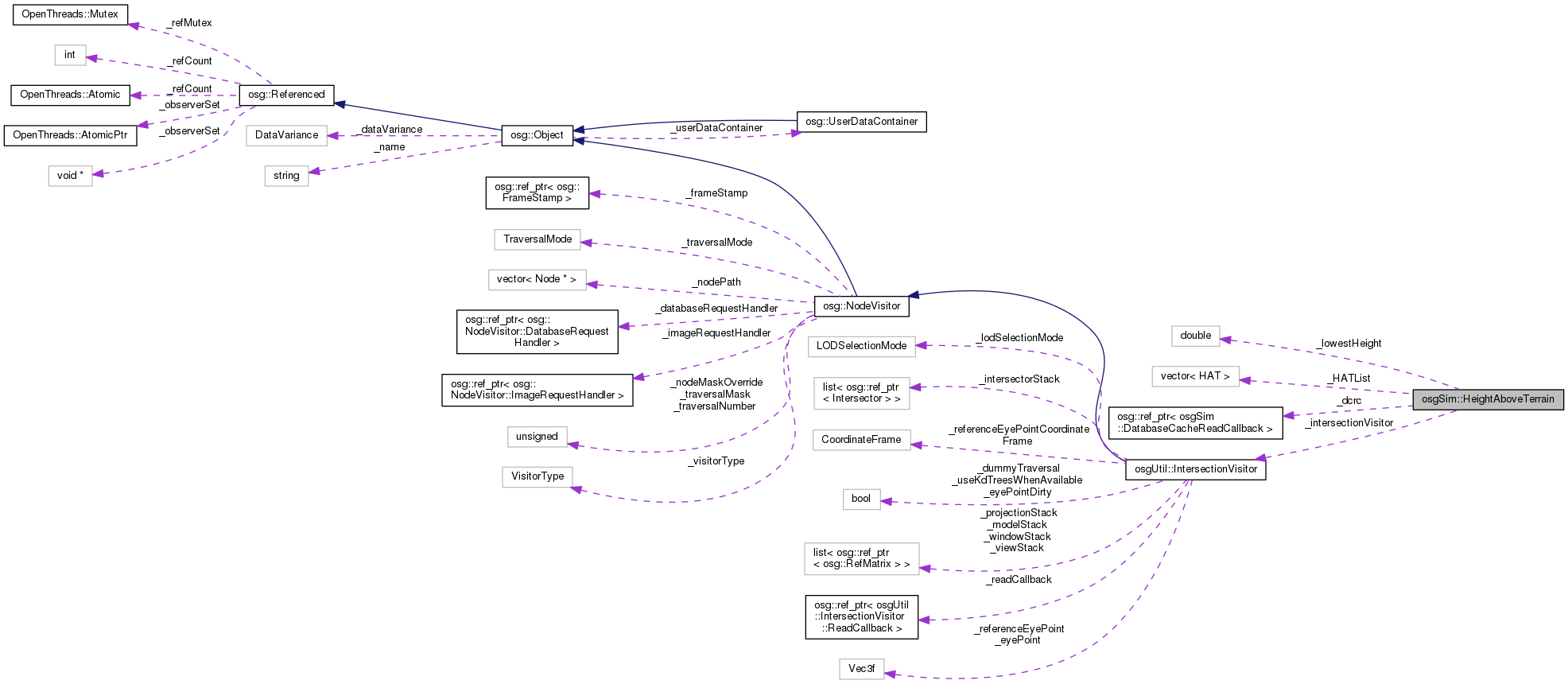
Helper class for setting up and acquiring height above terrain intersections with terrain.
More...
|
|
typedef std::vector< HAT > | HATList |
| |
Helper class for setting up and acquiring height above terrain intersections with terrain.
By default assigns a osgSim::DatabaseCacheReadCallback that enables automatic loading of external PagedLOD tiles to ensure that the highest level of detail is used in intersections. This automatic loading of tiles is done by the intersection traversal that is done within the computeIntersections(..) method, so can result in long intersection times when external tiles have to be loaded. The external loading of tiles can be disabled by removing the read callback, this is done by calling the setDatabaseCacheReadCallback(DatabaseCacheReadCallback*) method with a value of 0.
◆ addPoint()
| unsigned int osgSim::HeightAboveTerrain::addPoint |
( |
const osg::Vec3d & |
point | ) |
|
Add a height above terrain test point in the CoordinateFrame.
◆ clear()
| void osgSim::HeightAboveTerrain::clear |
( |
| ) |
|
Clear the internal HAT List so it contains no height above terrain tests.
◆ clearDatabaseCache()
| void osgSim::HeightAboveTerrain::clearDatabaseCache |
( |
| ) |
|
|
inline |
Clear the database cache.
◆ computeHeightAboveTerrain()
Compute the vertical distance between the specified scene graph and a single HAT point.
◆ computeIntersections()
Compute the HAT intersections with the specified scene graph.
The results are all stored in the form of a single height above terrain value per HAT test. Note, if the topmost node is a CoordinateSystemNode then the input points are assumed to be geocentric, with the up vector defined by the EllipsoidModel attached to the CoordinateSystemNode. If the topmost node is not a CoordinateSystemNode then a local coordinates frame is assumed, with a local up vector.
◆ getDatabaseCacheReadCallback()
Get the ReadCallback that does the reading of external PagedLOD models, and caching of loaded subgraphs.
◆ getHeightAboveTerrain()
| double osgSim::HeightAboveTerrain::getHeightAboveTerrain |
( |
unsigned int |
i | ) |
const |
|
inline |
Get the intersection height for a single height above terrain test.
Note, you must call computeIntersections(..) before you can query the HeightAboveTerrain. If no intersections are found then height returned will be the height above mean sea level.
◆ getLowestHeight()
| double osgSim::HeightAboveTerrain::getLowestHeight |
( |
| ) |
const |
|
inline |
Get the lowest height that the should be tested for.
◆ getNumPoints()
| unsigned int osgSim::HeightAboveTerrain::getNumPoints |
( |
| ) |
const |
|
inline |
Get the number of height above terrain tests.
◆ getPoint()
| const osg::Vec3d& osgSim::HeightAboveTerrain::getPoint |
( |
unsigned int |
i | ) |
const |
|
inline |
Get the source point of single height above terrain test.
◆ setDatabaseCacheReadCallback()
Set the ReadCallback that does the reading of external PagedLOD models, and caching of loaded subgraphs.
Note, if you have multiple LineOfSight or HeightAboveTerrain objects in use at one time then you should share a single DatabaseCacheReadCallback between all of them.
◆ setLowestHeight()
| void osgSim::HeightAboveTerrain::setLowestHeight |
( |
double |
lowestHeight | ) |
|
|
inline |
Set the lowest height that the should be tested for.
Defaults to -1000, i.e. 1000m below mean sea level.
◆ setPoint()
| void osgSim::HeightAboveTerrain::setPoint |
( |
unsigned int |
i, |
|
|
const osg::Vec3d & |
point |
|
) |
| |
|
inline |
Set the source point of single height above terrain test.
The documentation for this class was generated from the following file:
- /home/karlu20/private/installs/OpenSceneGraph/include/osgSim/HeightAboveTerrain